Product Overview
Booster K1 is a humanoid robot development platform for scenarios such as competitions, education, and entertainment, featuring affordable, portable, and durable.
Use Case and Market Comparison
The Booster K1 is designed as a high-performance, cost-effective humanoid development platform, specifically targeting applications in research, education, and competitions like the RoboCup Soccer League. It aims to bridge the gap between smaller, education-focused robots and larger, more expensive research platforms.
Limitations
This is a technical development platform. Users are expected to have some background in robotics, Linux, and C++/Python. While robust, the low-level SDK (CUSTOM mode) provides direct joint control, which can lead to hardware damage if used improperly (see Section 2.3.4).
Market Comparison
The following table provides a brief comparison with other well-known platforms in the field.
Feature |
Booster K1 |
NAO V6 |
Unitree G1 (EDU) |
|---|---|---|---|
DoFs (Total) |
22 |
25 |
23 (up to 43) |
Processor |
Jetson Orin NX 8GB |
Intel Atom E3845 |
Jetson Orin NX 16GB |
AI Compute |
117 TOPS |
N/A (CPU-based) |
100 TOPS |
RAM |
8GB LPDDR5 |
4GB DDR3 |
16GB LPDDR5 |
Weight |
~19.5 kg |
5.48 kg |
~35 kg |
Primary Target |
RoboCup, Research |
Education, HRI |
R&D, Agility |
Product Composition
The K1 robot consists of head, torso, arms, and legs, with a total of 19 DoFs, allowing for flexible movement and posture control.
The head has 2 DoFs, including Yaw Joint and Pitch Joint. It contains a depth camera and microphone array.
Each arm has 4 DoFs, including Shoulder Pitch Joint, Shoulder Roll Joint, Shoulder Yaw Joint, and Elbow Joint.
Each leg has 5 DoFs, including Hip Pitch Joint, Hip Roll Joint, Hip Yaw Joint, Knee Joint, and Ankle Up and Down Joint.
Controller board, speaker and battery are installed in torso.
Product Functions
Omnidirectional Walking
Supports forward, backward, and lateral walking.
Supports rotation and complex walking.
Disturbance Resistance while Walking
Can walk on uneven surfaces.
Can withstand certain impact disturbances while walking.
Predefined Actions
Waving.
Shaking hand.
Fall recovery.
Safety Protection
Automatically enters damping mode in uncontrolled states to prevent damage.
Soft emergency stop.
Product Specifications
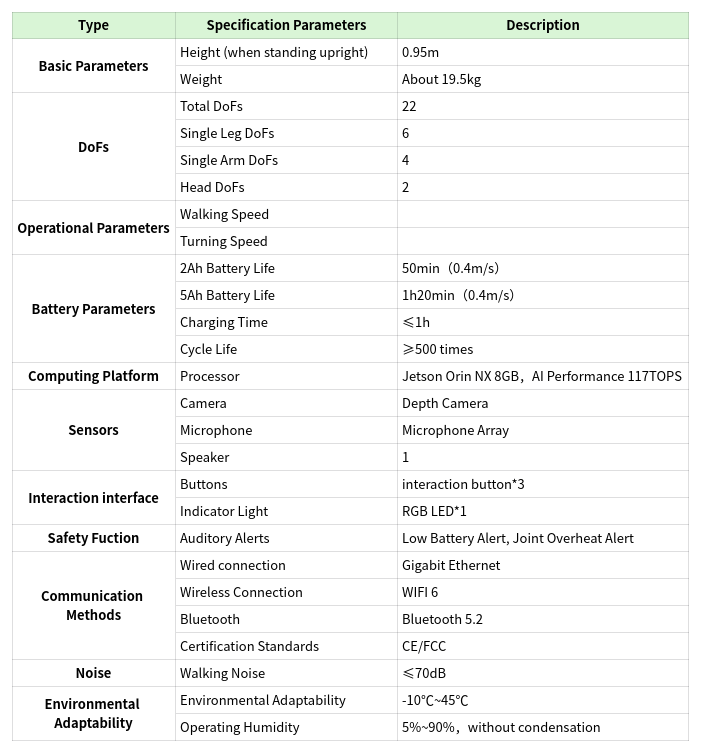
Main parts
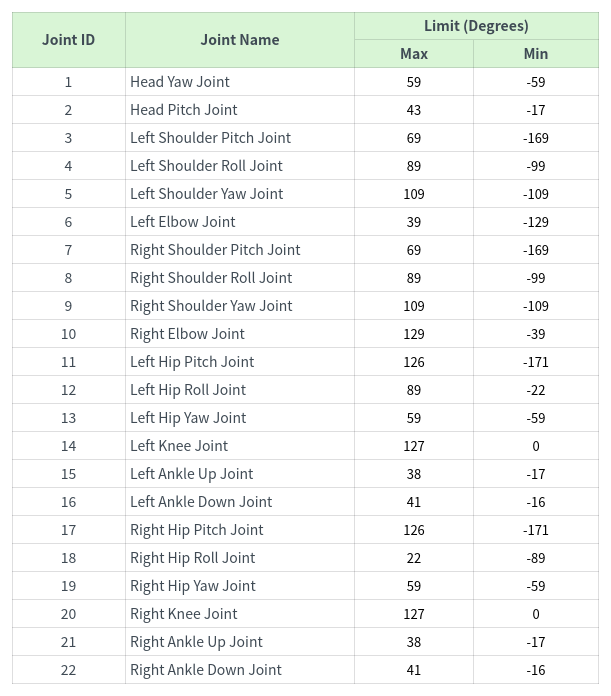
Joint ID and limits.
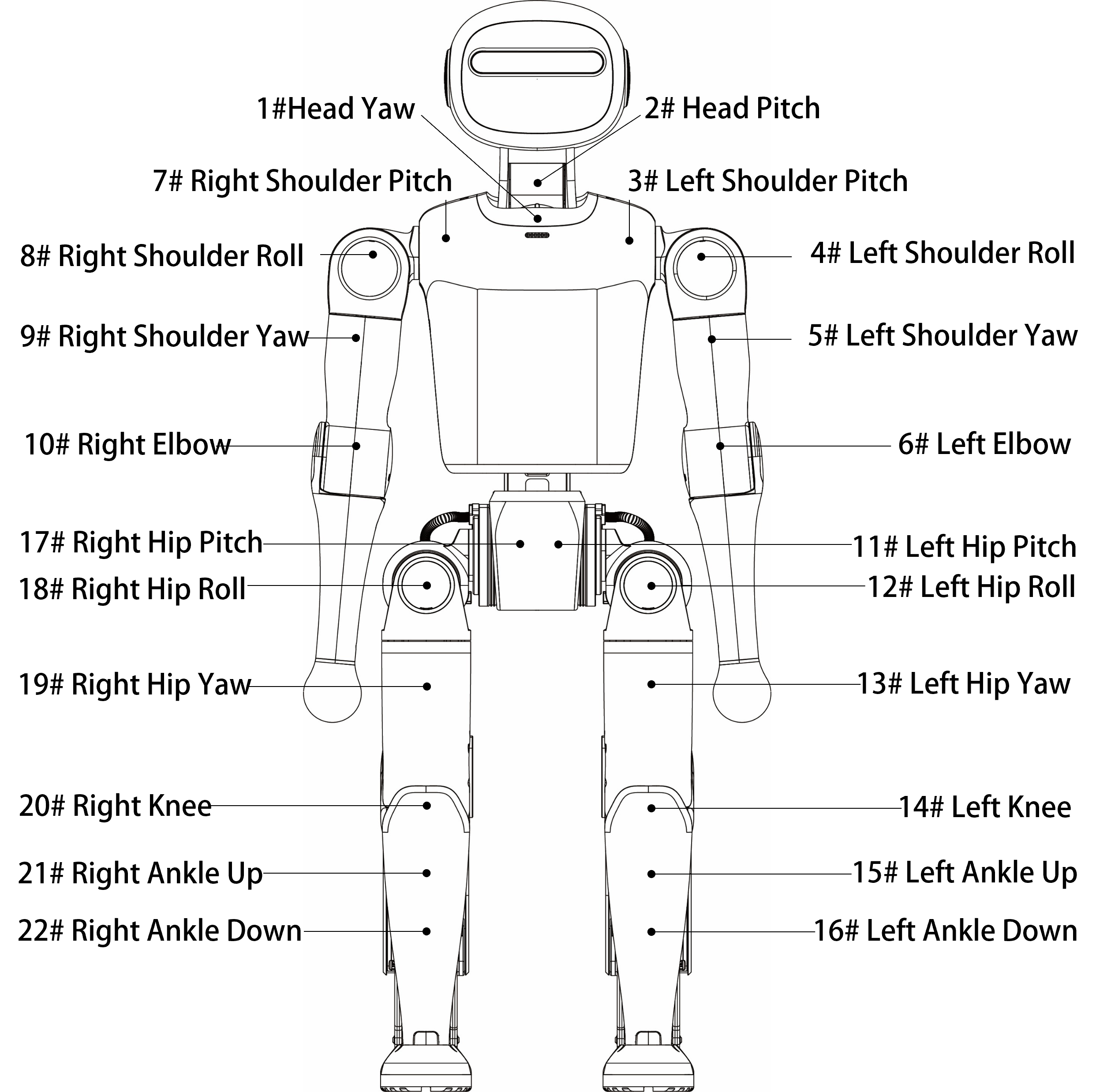
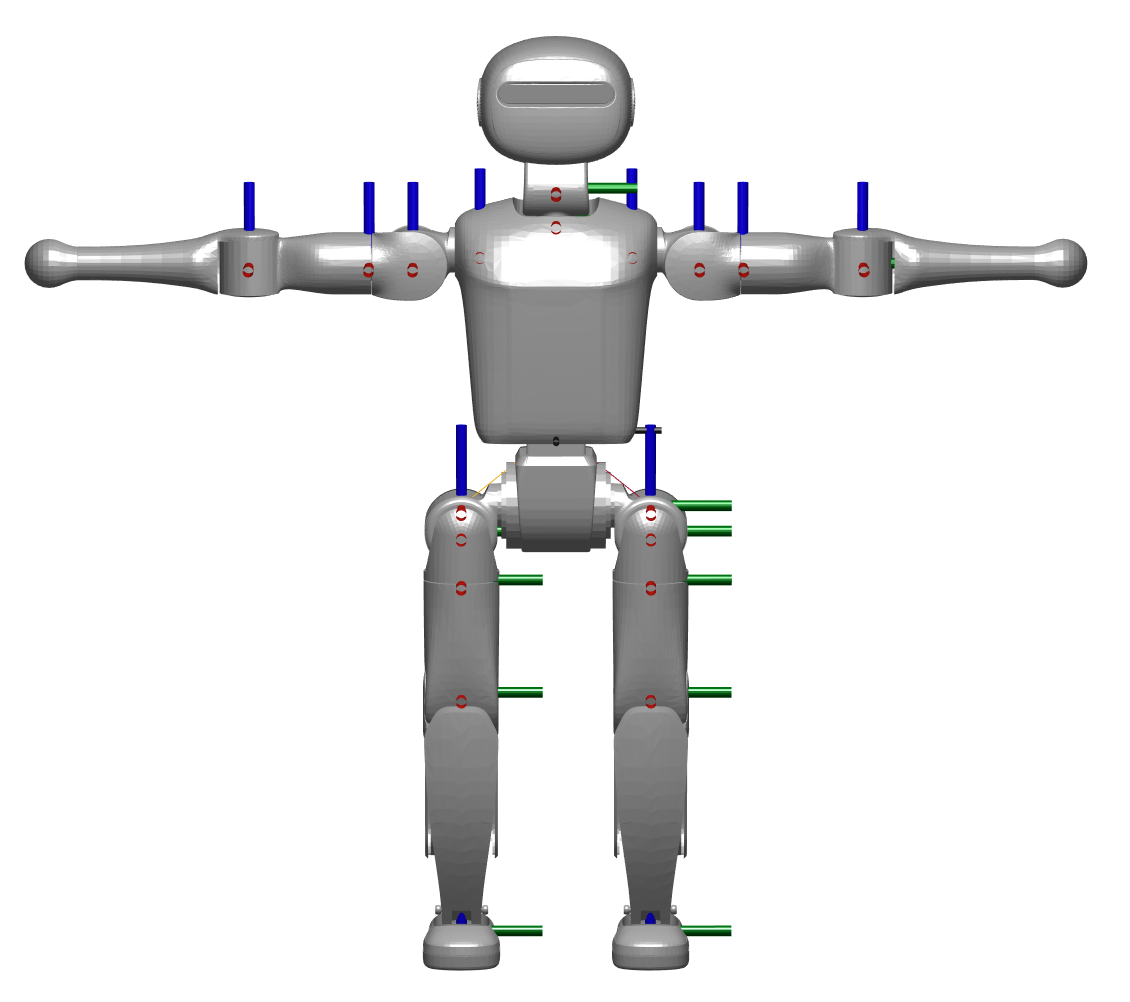
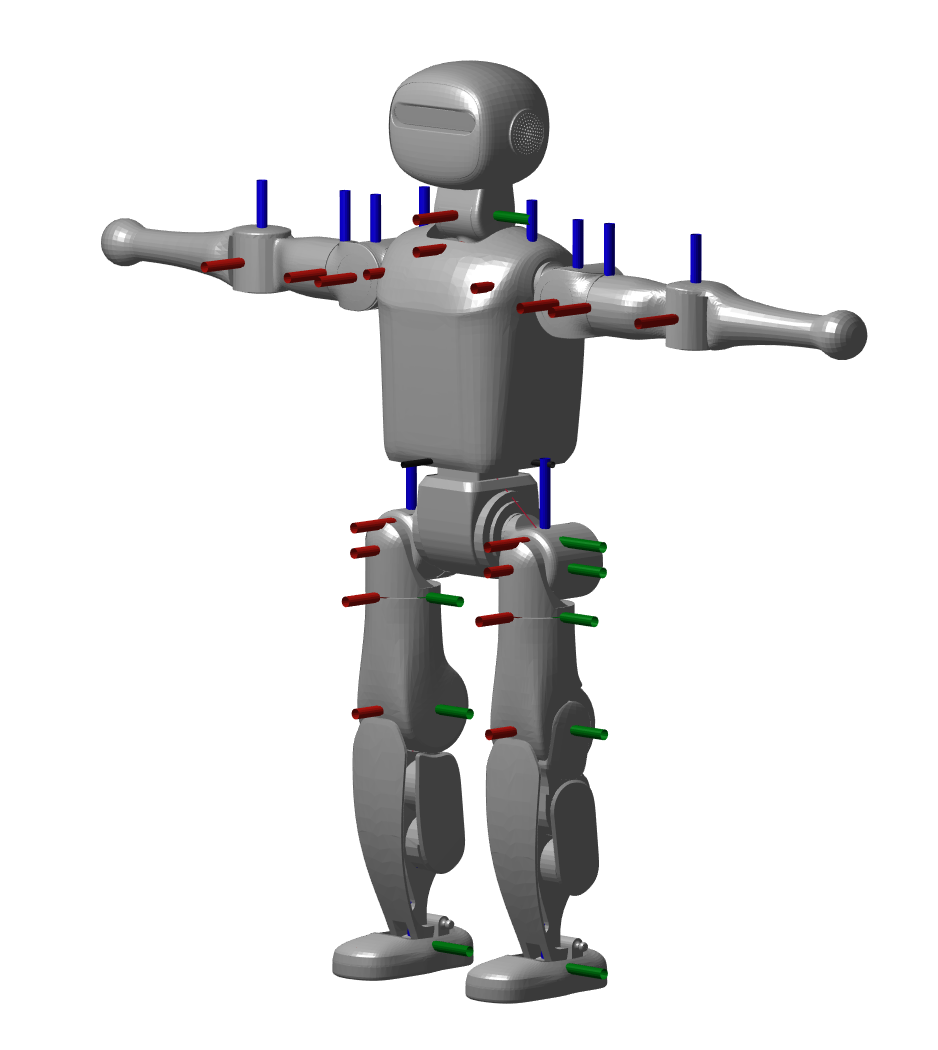
Coordinate System
The joint coordinate system with all joints at zero position is shown in the diagram below.
Controller
Motion control board |
|
|---|---|
Processor |
Jetson Orin NX 8GB |
Computing performance |
8-core Cortex-A78AE CPU@2GHz |
Tensor Cores GPU@1020MHz |
|
AI performance: 100 TOPS |
|
Memory |
8GB |
Storage |
128GB |
Wired Network |
1000Mx2 |
Wireless Network |
WIFI6x2 |
Audio |
Microphone, speaker |